
A hull is the watertight body of a ship, boat, submarine, or flying boat. The hull may open at the top, or it may be fully or partially covered with a deck. Atop the deck may be a deckhouse and other superstructures, such as a funnel, derrick, or mast. The line where the hull meets the water surface is called the waterline.

A propeller is a device with a rotating hub and radiating blades that are set at a pitch to form a helical spiral which, when rotated, exerts linear thrust upon a working fluid such as water or air. Propellers are used to pump fluid through a pipe or duct, or to create thrust to propel a boat through water or an aircraft through air. The blades are shaped so that their rotational motion through the fluid causes a pressure difference between the two surfaces of the blade by Bernoulli's principle which exerts force on the fluid. Most marine propellers are screw propellers with helical blades rotating on a propeller shaft with an approximately horizontal axis.

Naval architecture, or naval engineering, is an engineering discipline incorporating elements of mechanical, electrical, electronic, software and safety engineering as applied to the engineering design process, shipbuilding, maintenance, and operation of marine vessels and structures. Naval architecture involves basic and applied research, design, development, design evaluation (classification) and calculations during all stages of the life of a marine vehicle. Preliminary design of the vessel, its detailed design, construction, trials, operation and maintenance, launching and dry-docking are the main activities involved. Ship design calculations are also required for ships being modified. Naval architecture also involves formulation of safety regulations and damage-control rules and the approval and certification of ship designs to meet statutory and non-statutory requirements.

A rudder is a primary control surface used to steer a ship, boat, submarine, hovercraft, airship, or other vehicle that moves through a fluid medium. On an airplane, the rudder is used primarily to counter adverse yaw and p-factor and is not the primary control used to turn the airplane. A rudder operates by redirecting the fluid past the hull or fuselage, thus imparting a turning or yawing motion to the craft. In basic form, a rudder is a flat plane or sheet of material attached with hinges to the craft's stern, tail, or after end. Often rudders are shaped so as to minimize hydrodynamic or aerodynamic drag. On simple watercraft, a tiller—essentially, a stick or pole acting as a lever arm—may be attached to the top of the rudder to allow it to be turned by a helmsman. In larger vessels, cables, pushrods, or hydraulics may be used to link rudders to steering wheels. In typical aircraft, the rudder is operated by pedals via mechanical linkages or hydraulics.

Flight dynamics is the science of air vehicle orientation and control in three dimensions. The three critical flight dynamics parameters are the angles of rotation in three dimensions about the vehicle's center of gravity (cg), known as pitch, roll and yaw. These are collectively known as aircraft attitude, often principally relative to the atmospheric frame in normal flight, but also relative to terrain during takeoff or landing, or when operating at low elevation. The concept of attitude is not specific to fixed-wing aircraft, but also extends to rotary aircraft such as helicopters, and dirigibles, where the flight dynamics involved in establishing and controlling attitude are entirely different.

The semicircular canals are three semicircular interconnected tubes located in the innermost part of each ear, the inner ear. The three canals are the lateral, anterior and posterior semicircular canals. They are the part of the bony labyrinth, a periosteum-lined cavity on the petrous part of the temporal bone filled with perilymph.

Aircraft flight control surfaces are aerodynamic devices allowing a pilot to adjust and control the aircraft's flight attitude.

The metacentric height (GM) is a measurement of the initial static stability of a floating body. It is calculated as the distance between the centre of gravity of a ship and its metacentre. A larger metacentric height implies greater initial stability against overturning. The metacentric height also influences the natural period of rolling of a hull, with very large metacentric heights being associated with shorter periods of roll which are uncomfortable for passengers. Hence, a sufficiently, but not excessively, high metacentric height is considered ideal for passenger ships.

Aerobatic maneuvers are flight paths putting aircraft in unusual attitudes, in air shows, dogfights or competition aerobatics. Aerobatics can be performed by a single aircraft or in formation with several others. Nearly all aircraft are capable of performing aerobatics maneuvers of some kind, although it may not be legal or safe to do so in certain aircraft.
Aircraft flight mechanics are relevant to fixed wing and rotary wing (helicopters) aircraft. An aeroplane, is defined in ICAO Document 9110 as, "a power-driven heavier than air aircraft, deriving its lift chiefly from aerodynamic reactions on surface which remain fixed under given conditions of flight".
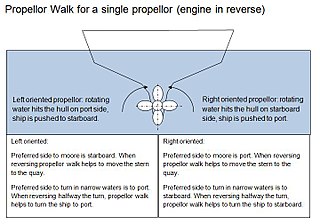
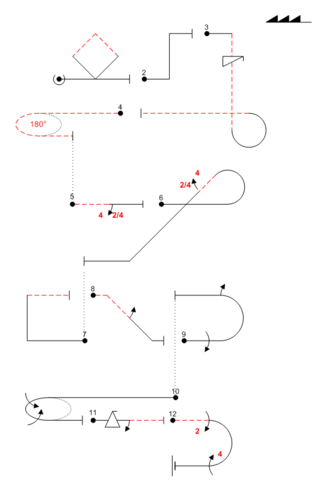
Propeller walk is the term for a propeller's tendency to rotate about a vertical axis. The rotation is in addition to the forward or backward acceleration.

Manoeuvering thrusters are transversal propulsion devices built into or mounted to either the bow or stern of a ship or boat to make it more manoeuvrable. Bow thrusters make docking easier, since they allow the captain to turn the vessel to port or starboard side, without using the main propulsion mechanism which requires some forward motion for turning; The effectiveness of a thruster is curtailed by any forward motion due to the Coandă effect. A stern thruster is of the same principle, fitted at the stern. Sufficiently large vessels often have multiple bow thrusters and stern thrusters.
Roll moment is a moment, which is a product of a force and a distance, that tends to cause a vehicle to roll, that is to rotate about its longitudinal axis.

The mecanum wheel is an omnidirectional wheel design for a land-based vehicle to move in any direction. It is sometimes called the Swedish wheel or Ilon wheel after its inventor, Bengt Erland Ilon (1923–2008), who conceived of the concept while working as an engineer with the Swedish company Mecanum AB, and patented it in the United States on November 13, 1972.
The dynamic stability of an aircraft refers to how the aircraft behaves after it has been disturbed following steady non-oscillating flight.

Six degrees of freedom (6DOF), or sometimes six degrees of movement, refers to the six mechanical degrees of freedom of movement of a rigid body in three-dimensional space. Specifically, the body is free to change position as forward/backward (surge), up/down (heave), left/right (sway) translation in three perpendicular axes, combined with changes in orientation through rotation about three perpendicular axes, often termed yaw, pitch, and roll.
An aircraft in flight is free to rotate in three dimensions: yaw, nose left or right about an axis running up and down; pitch, nose up or down about an axis running from wing to wing; and roll, rotation about an axis running from nose to tail. The axes are alternatively designated as vertical, lateral, and longitudinal respectively. These axes move with the vehicle and rotate relative to the Earth along with the craft. These definitions were analogously applied to spacecraft when the first crewed spacecraft were designed in the late 1950s.

Ship stability is an area of naval architecture and ship design that deals with how a ship behaves at sea, both in still water and in waves, whether intact or damaged. Stability calculations focus on centers of gravity, centers of buoyancy, the metacenters of vessels, and on how these interact.
Radio-controlled aerobatics is the practice of flying radio-controlled aircraft in maneuvers involving aircraft attitudes that are not used in normal flight.

A marine thruster is a device for producing directed hydrodynamic thrust mounted on a marine vehicle, primarily for maneuvering or propulsion. There are a variety of different types of marine thrusters and each of them plays a role in the maritime industry. Marine thrusters come in many different shapes and sizes, for example screw propellers, Voith-Schneider propellers, waterjets, ducted propellers, tunnel bow thrusters, and stern thrusters, azimuth thrusters, rim-driven thrusters, ROV and submersible drive units. A marine thruster consists of a propeller or impeller which may be encased in some kind of tunnel or ducting that directs the flow of water to produce a resultant force intended to obtain movement in the desired direction or resist forces which would cause unwanted movement. The two subcategories of marine thrusters are for propulsion and maneuvering, the maneuvering thruster typically in the form of bow or stern thrusters and propulsion thrusters ranging from Azimuth thrusters to Rim Drive thrusters.


