
Friction is the force resisting the relative motion of solid surfaces, fluid layers, and material elements sliding against each other. Types of friction include dry, fluid, lubricated, skin, and internal.
In physics, mean free path is the average distance over which a moving particle travels before substantially changing its direction or energy, typically as a result of one or more successive collisions with other particles.
Tribology is the science and engineering of understanding friction, lubrication and wear phenomena for interacting surfaces in relative motion. It is highly interdisciplinary, drawing on many academic fields, including physics, chemistry, materials science, mathematics, biology and engineering. The fundamental objects of study in tribology are tribosystems, which are physical systems of contacting surfaces. Subfields of tribology include biotribology, nanotribology and space tribology. It is also related to other areas such as the coupling of corrosion and tribology in tribocorrosion and the contact mechanics of how surfaces in contact deform. Approximately 20% of the total energy expenditure of the world is due to the impact of friction and wear in the transportation, manufacturing, power generation, and residential sectors.

Aquaplaning or hydroplaning by the tires of a road vehicle, aircraft or other wheeled vehicle occurs when a layer of water builds between the wheels of the vehicle and the road surface, leading to a loss of traction that prevents the vehicle from responding to control inputs. If it occurs to all wheels simultaneously, the vehicle becomes, in effect, an uncontrolled sled. Aquaplaning is a different phenomenon from when water on the surface of the roadway merely acts as a lubricant. Traction is diminished on wet pavement even when aquaplaning is not occurring.

Rolling resistance, sometimes called rolling friction or rolling drag, is the force resisting the motion when a body rolls on a surface. It is mainly caused by non-elastic effects; that is, not all the energy needed for deformation of the wheel, roadbed, etc., is recovered when the pressure is removed. Two forms of this are hysteresis losses, and permanent (plastic) deformation of the object or the surface. Note that the slippage between the wheel and the surface also results in energy dissipation. Although some researchers have included this term in rolling resistance, some suggest that this dissipation term should be treated separately from rolling resistance because it is due to the applied torque to the wheel and the resultant slip between the wheel and ground, which is called slip loss or slip resistance. In addition, only the so-called slip resistance involves friction, therefore the name "rolling friction" is to an extent a misnomer.
Brake fade is the reduction in stopping power that can occur after repeated or sustained application of the brakes of a vehicle, especially in high load or high speed conditions. Brake fade can be a factor in any vehicle that utilizes a friction braking system including automobiles, trucks, motorcycles, airplanes, and bicycles.

An adhesion railway relies on adhesion traction to move the train, and is the most widespread and common type of railway in the world. Adhesion traction is the friction between the drive wheels and the steel rail. Since the vast majority of railways are adhesion railways, the term adhesion railway is used only when it is necessary to distinguish adhesion railways from railways moved by other means, such as by a stationary engine pulling on a cable attached to the cars or by railways that are moved by a pinion meshing with a rack.
In fluid dynamics, drag, sometimes referred to as fluid resistance, is a force acting opposite to the relative motion of any object, moving with respect to a surrounding fluid. This can exist between two fluid layers, two solid surfaces, or between a fluid and solid surface. Drag forces tend to decrease fluid velocity relative to the solid object in the fluid's path.

A skid mark is the visible mark left by any solid which moves against another, and is an important aspect of trace evidence analysis in forensic science and forensic engineering. Skid marks caused by tires on roads occur when a vehicle wheel stops rolling and slides or spins on the surface of the road. Skid marks can be analyzed to find the maximum and minimum vehicle speed prior to an impact or incident. Skidding can also occur on black ice or diesel deposits on the road and may not leave a mark at all.
A banked turn is a turn or change of direction in which the vehicle banks or inclines, usually towards the inside of the turn. For a road or railroad this is usually due to the roadbed having a transverse down-slope towards the inside of the curve. The bank angle is the angle at which the vehicle is inclined about its longitudinal axis with respect to the horizontal.

Uniform Tire Quality Grading, commonly abbreviated as UTQG, is a set of standards for passenger car tires that measures a tire's treadwear, temperature resistance and traction. The UTQG was created by the National Highway Traffic Safety Administration in 1978, a branch of the United States Department of Transportation (DOT). All passenger car tires manufactured for sale in the United States since March 31, 1979 are federally mandated to have the UTQG ratings on their sidewall as part of the DOT approval process, in which non-DOT approved tires are not legal for street use in the United States. Light truck tires are not required to have a UTQG. It is not to be confused with the tire code, a supplemental and global standard measuring tire dimensions, load-bearing ability and maximum speed, maintained by tire industry trade organizations and the International Organization for Standardization.
Stopping sight distance is one of several types of sight distance used in road design. It is a near worst-case distance a vehicle driver needs to be able to see in order to have room to stop before colliding with something in the roadway, such as a pedestrian in a crosswalk, a stopped vehicle, or road debris. Insufficient sight distance can adversely affect the safety or operations of a roadway or intersection.

Bicycle and motorcycle dynamics is the science of the motion of bicycles and motorcycles and their components, due to the forces acting on them. Dynamics falls under a branch of physics known as classical mechanics. Bike motions of interest include balancing, steering, braking, accelerating, suspension activation, and vibration. The study of these motions began in the late 19th century and continues today.
Headway is the distance or duration between vehicles in a transit system measured in space or time. The minimum headway is the shortest such distance or time achievable by a system without a reduction in the speed of vehicles. The precise definition varies depending on the application, but it is most commonly measured as the distance from the tip of one vehicle to the tip of the next one behind it. It can be expressed as the distance between vehicles, or as time it will take for the trailing vehicle to cover that distance. A "shorter" headway signifies closer spacing between the vehicles. Airplanes operate with headways measured in hours or days, freight trains and commuter rail systems might have headways measured in parts of an hour, metro and light rail systems operate with headways on the order of 90 seconds to 20 minutes, and vehicles on a freeway can have as little as 2 seconds headway between them.

Road slipperiness is a condition of low skid resistance due to insufficient road friction. It is a result of snow, ice, water, loose material and the texture of the road surface on the traction produced by the wheels of a vehicle.
In the design of fluid bearings, the Sommerfeld number (S) is a dimensionless quantity used extensively in hydrodynamic lubrication analysis. The Sommerfeld number is very important in lubrication analysis because it contains all the variables normally specified by the designer.
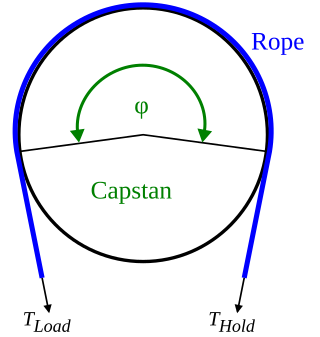
The capstan equation or belt friction equation, also known as Euler-Eytelwein formula, relates the hold-force to the load-force if a flexible line is wound around a cylinder.

The geometric design of roads is the branch of highway engineering concerned with the positioning of the physical elements of the roadway according to standards and constraints. The basic objectives in geometric design are to optimize efficiency and safety while minimizing cost and environmental damage. Geometric design also affects an emerging fifth objective called "livability," which is defined as designing roads to foster broader community goals, including providing access to employment, schools, businesses and residences, accommodate a range of travel modes such as walking, bicycling, transit, and automobiles, and minimizing fuel use, emissions and environmental damage.
Contact mechanics is the study of the deformation of solids that touch each other at one or more points. This can be divided into compressive and adhesive forces in the direction perpendicular to the interface, and frictional forces in the tangential direction. Frictional contact mechanics is the study of the deformation of bodies in the presence of frictional effects, whereas frictionless contact mechanics assumes the absence of such effects.
In legal terminology, the assured clear distance ahead (ACDA) is the distance ahead of any terrestrial locomotive device such as a land vehicle, typically an automobile, or watercraft, within which they should be able to bring the device to a halt. It is one of the most fundamental principles governing ordinary care and the duty of care for all methods of conveyance, and is frequently used to determine if a driver is in proper control and is a nearly universally implicit consideration in vehicular accident liability. The rule is a precautionary trivial burden required to avert the great probable gravity of precious life loss and momentous damage. Satisfying the ACDA rule is necessary but not sufficient to comply with the more generalized basic speed law, and accordingly, it may be used as both a layman's criterion and judicial test for courts to use in determining if a particular speed is negligent, but not to prove it is safe. As a spatial standard of care, it also serves as required explicit and fair notice of prohibited conduct so unsafe speed laws are not void for vagueness. The concept has transcended into accident reconstruction and engineering.




















