The 9 possible connectivities in a 5x5x5 neighborhood
In order to specify a set of connectivities, the dimension and the width of the neighborhood , must be specified. The dimension of a neighborhood is valid for any dimension . A common width is 3, which means along each dimension, the central cell will be adjacent to 1 cell on either side for all dimensions.
Let represent a N-dimensional hypercubic neighborhood with size on each dimension of
Let represent a discrete vector in the first orthant from the center structuring element to a point on the boundary of . This implies that each element and that at least one component
Let represent a N-dimensional hypersphere with radius of .
Define the amount of elements on the hypersphere within the neighborhood as . For a given , will be equal to the amount of permutations of multiplied by the number of orthants.
Let represent the amount of elements in vector which take the value .
The total number of permutation of can be represented by a multinomial as
If any , then the vector is shared in common between orthants. Because of this, the multiplying factor on the permutation must be adjusted from to be
Multiplying the number of amount of permutations by the adjusted amount of orthants yields,
Let represent the number of elements inside of the hypersphere within the neighborhood . will be equal to the number of elements on the hypersphere plus all of the elements on the inner shells. The shells must be ordered by increasing order of . Assume the ordered vectors are assigned a coefficient representing its place in order. Then an ordered vector if all are unique. Therefore can be defined iteratively as
,
or
If some , then both vectors should be considered as the same such that
Note that each neighborhood will need to have the values from the next smallest neighborhood added. Ex.
includes the center hypervoxel, which is not included in the connectivity. Subtracting 1 yields the neighborhood connectivity,
In this scenario, since the vector is 3-dimensional. since there is one . Likewise, . since . . The neighborhood is and the hypersphere is
The basic in the neighborhood , . The Manhattan Distance between our vector and the basic vector is , so . Therefore,
Which matches the supplied table
Higher values of k & N
The assumption that all are unique does not hold for higher values of k & N. Consider , and the vectors . Although is located in , the value for , whereas is in the smaller space but has an equivalent value . but has a higher value of than the minimum vector in .
For this assumption to hold,
At higher values of & , Values of will become ambiguous. This means that specification of a given could refer to multiple .
Types of connectivity
2-dimensional
Example of neighborhood of pixels - association of eight and four pixels
4-connected
4-connected pixels are neighbors to every pixel that touches one of their edges. These pixels are connected horizontally and vertically. In terms of pixel coordinates, every pixel that has the coordinates
6-connected pixels are neighbors to every pixel that touches one of their corners (which includes pixels that touch one of their edges) in a hexagonal grid or stretcher bond rectangular grid.
There are several ways to map hexagonal tiles to integer pixel coordinates. With one method, in addition to the 4-connected pixels, the two pixels at coordinates and are connected to the pixel at .
8-connected
8-connected pixels are neighbors to every pixel that touches one of their edges or corners. These pixels are connected horizontally, vertically, and diagonally. In addition to 4-connected pixels, each pixel with coordinates is connected to the pixel at .
6-connected pixels are neighbors to every pixel that touches one of their faces. These pixels are connected along one of the primary axes. Each pixel with coordinates , , or is connected to the pixel at .
18-connected
18-connected pixels are neighbors to every pixel that touches one of their faces or edges. These pixels are connected along either one or two of the primary axes. In addition to 6-connected pixels, each pixel with coordinates , , , , , or is connected to the pixel at .
26-connected
26-connected pixels are neighbors to every pixel that touches one of their faces, edges, or corners. These pixels are connected along either one, two, or all three of the primary axes. In addition to 18-connected pixels, each pixel with coordinates , , , or is connected to the pixel at .
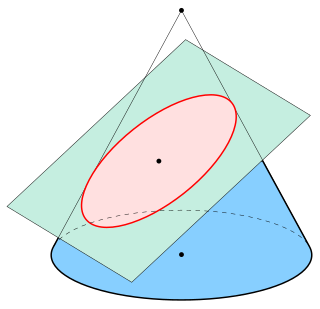
In mathematics, an ellipse is a plane curve surrounding two focal points, such that for all points on the curve, the sum of the two distances to the focal points is a constant. It generalizes a circle, which is the special type of ellipse in which the two focal points are the same. The elongation of an ellipse is measured by its eccentricity , a number ranging from to .
In mathematical physics and mathematics, the Pauli matrices are a set of three 2 × 2 complex matrices that are Hermitian, involutory and unitary. Usually indicated by the Greek letter sigma, they are occasionally denoted by tau when used in connection with isospin symmetries.
In vector calculus and differential geometry the generalized Stokes theorem, also called the Stokes–Cartan theorem, is a statement about the integration of differential forms on manifolds, which both simplifies and generalizes several theorems from vector calculus. In particular, the fundamental theorem of calculus is the special case where the manifold is a line segment, Green’s theorem and Stokes' theorem are the cases of a surface in or and the divergence theorem is the case of a volume in Hence, the theorem is sometimes referred to as the Fundamental Theorem of Multivariate Calculus.
In Euclidean geometry, an affine transformation or affinity is a geometric transformation that preserves lines and parallelism, but not necessarily Euclidean distances and angles.
In mathematics, an n-sphere or hypersphere is an n-dimensional generalization of the 1-dimensional circle and 2-dimensional sphere to any non-negative integer n. The n-sphere is the setting for n-dimensional spherical geometry.
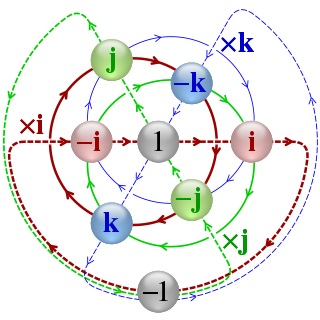
In mathematics, the quaternion number system extends the complex numbers. Quaternions were first described by the Irish mathematician William Rowan Hamilton in 1843 and applied to mechanics in three-dimensional space. The algebra of quaternions is often denoted by H, or in blackboard bold by Although multiplication of quaternions is noncommutative, it gives a definition of the quotient of two vectors in a three-dimensional space. Quaternions are generally represented in the form
A mathematical symbol is a figure or a combination of figures that is used to represent a mathematical object, an action on mathematical objects, a relation between mathematical objects, or for structuring the other symbols that occur in a formula. As formulas are entirely constituted with symbols of various types, many symbols are needed for expressing all mathematics.
In mathematics, a quadric or quadric surface (quadric hypersurface in higher dimensions), is a generalization of conic sections (ellipses, parabolas, and hyperbolas). It is a hypersurface (of dimension D) in a (D + 1)-dimensional space, and it is defined as the zero set of an irreducible polynomial of degree two in D + 1 variables; for example, D = 1 in the case of conic sections. When the defining polynomial is not absolutely irreducible, the zero set is generally not considered a quadric, although it is often called a degenerate quadric or a reducible quadric.
Unit quaternions, known as versors, provide a convenient mathematical notation for representing spatial orientations and rotations of elements in three dimensional space. Specifically, they encode information about an axis-angle rotation about an arbitrary axis. Rotation and orientation quaternions have applications in computer graphics, computer vision, robotics, navigation, molecular dynamics, flight dynamics, orbital mechanics of satellites, and crystallographic texture analysis.
In physics and mathematics, the Lorentz group is the group of all Lorentz transformations of Minkowski spacetime, the classical and quantum setting for all (non-gravitational) physical phenomena. The Lorentz group is named for the Dutch physicist Hendrik Lorentz.
In mathematics, the Hodge star operator or Hodge star is a linear map defined on the exterior algebra of a finite-dimensional oriented vector space endowed with a nondegenerate symmetric bilinear form. Applying the operator to an element of the algebra produces the Hodge dual of the element. This map was introduced by W. V. D. Hodge.
Electrostatics is a branch of physics that studies slow-moving or stationary electric charges.
In mathematics, the Heisenberg group, named after Werner Heisenberg, is the group of 3×3 upper triangular matrices of the form
In physics, the reciprocal lattice emerges from the Fourier transform of another lattice. The direct lattice or real lattice is a periodic function in physical space, such as a crystal system. The reciprocal lattice exists in the mathematical space of spatial frequencies, known as reciprocal space or k space, where refers to the wavevector.
In mathematics, a norm is a function from a real or complex vector space to the non-negative real numbers that behaves in certain ways like the distance from the origin: it commutes with scaling, obeys a form of the triangle inequality, and is zero only at the origin. In particular, the Euclidean distance in a Euclidean space is defined by a norm on the associated Euclidean vector space, called the Euclidean norm, the 2-norm, or, sometimes, the magnitude of the vector. This norm can be defined as the square root of the inner product of a vector with itself.
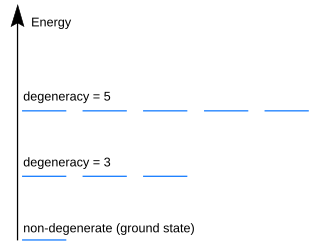
In quantum mechanics, an energy level is degenerate if it corresponds to two or more different measurable states of a quantum system. Conversely, two or more different states of a quantum mechanical system are said to be degenerate if they give the same value of energy upon measurement. The number of different states corresponding to a particular energy level is known as the degree of degeneracy of the level. It is represented mathematically by the Hamiltonian for the system having more than one linearly independent eigenstate with the same energy eigenvalue. When this is the case, energy alone is not enough to characterize what state the system is in, and other quantum numbers are needed to characterize the exact state when distinction is desired. In classical mechanics, this can be understood in terms of different possible trajectories corresponding to the same energy.
In conformal field theory and representation theory, a W-algebra is an associative algebra that generalizes the Virasoro algebra. W-algebras were introduced by Alexander Zamolodchikov, and the name "W-algebra" comes from the fact that Zamolodchikov used the letter W for one of the elements of one of his examples.
In the geometry of numbers, the Klein polyhedron, named after Felix Klein, is used to generalize the concept of continued fractions to higher dimensions.
In pure and applied mathematics, quantum mechanics and computer graphics, a tensor operator generalizes the notion of operators which are scalars and vectors. A special class of these are spherical tensor operators which apply the notion of the spherical basis and spherical harmonics. The spherical basis closely relates to the description of angular momentum in quantum mechanics and spherical harmonic functions. The coordinate-free generalization of a tensor operator is known as a representation operator.
The Pomeranchuk instability is an instability in the shape of the Fermi surface of a material with interacting fermions, causing Landau’s Fermi liquid theory to break down. It occurs when a Landau parameter in Fermi liquid theory has a sufficiently negative value, causing deformations of the Fermi surface to be energetically favourable. It is named after the Soviet physicist Isaak Pomeranchuk.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.