
Futsal is a ball sport played on a hard court, smaller than a football pitch, and mainly indoors. It has similarities to five-a-side football.
RoboCup is an annual international robotics competition proposed and founded in 1996 by a group of university professors. The aim of the competition is to promote robotics and AI research by offering a publicly appealing – but formidable – challenge.
RoboCup Junior (RCJ), sometimes stylised RobocupJunior, is a division of RoboCup, a not-for-profit robotics organisation. It focuses on education and aims to introduce the larger goals of the RoboCup project to primary and secondary school aged children. Participants compete in one of three main leagues: Soccer, Rescue or Dance. Dance Theatre also exists as a sub-league of Dance, and Premier Rescue is part of the competition in Australia.

A robot competition is an event where the abilities and characteristics of robots may be tested and assessed. Usually they have to beat other robots in order to become the best one. Many competitions are for schools but several competitions with professional and hobbyist participants are also arising.

Robot football is a sport organised by the Federation of International Robot-soccer Association. It aims to create a team of robots capable of beating a human side at football by 2050.

The RoboCup Simulation League is one of five soccer leagues within the RoboCup initiative.
The RoboCup Small Size League (SSL) is one of the RoboCup soccer leagues.
Tomotaka Takahashi, roboticist and founder of Kyoto University's ROBO-GARAGE since 2018, creates humanoid robots known for their smooth, fluid motions and sleek appearance. Creating a number of humanoid robots entirely by himself, from concept through to production, Takahashi's designs have been featured in art exhibitions celebrating the creation of Astroboy, Time Magazine's Coolest Inventions of 2004, and promotions for Bandai, Panasonic, and Pepsi. He has also worked with toy companies to produce relatively inexpensive robots for the hobby market, including those for Kyosho.
Robocup Rescue Simulation is an education and research project intended to promote the development of robotic agents for search and rescue. The project was initiated in reaction to the Great Hanshin earthquake, which hit Hyōgo Prefecture, Japan, on 17 January 1995, killing more than six thousand people, most of them in the city of Kobe.
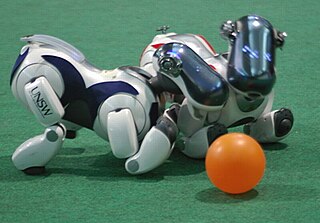
The RoboCup Standard Platform League (SPL) is one of several leagues within RoboCup, an international competition with autonomous robotic soccer matches as the main event.

The RoboCup Rescue Robot League is an international competition for urban search and rescue robots, in which robots compete to find victims in a simulated earthquake environment. The rescue robot league is run alongside Robocup Rescue Simulation, as part of the RoboCup robot competition.

The RoboCup 3D Simulated Soccer League allows software agents to control humanoid robots to compete against one another in a realistic simulation of the rules and physics of a game of soccer. The platform strives to reproduce the software programming challenges faced when building real physical robots for this purpose. In doing so, it helps research towards the RoboCup Federation's goal of developing a team of fully autonomous humanoid robots that can win against the human world soccer champion team in 2050.

DARwIn-OP is a miniature-humanoid robot platform developed and manufactured by Korean robot manufacturer Robotis in collaboration with Virginia Tech, Purdue University, and University of Pennsylvania. It is also supported by a $1.2 million NSF grant. DARwIn-OP has twenty degrees of freedom, each controlled by a DYNAMIXEL MX-28T servo motor.
Storming Robots is Robotics and Technology Learning Lab based in Branchburg, New Jersey. All of Storming Robots' programs are modeled to build and strengthen problem solving, computational and algorithmic thinking skills, and reinforce the engineering process. They use robotics as means to inspire children's interest and further their intellect in Science, Technology, Engineering, and Mathematics (STEM) and also analytic, computational, and strategic thinking.
The Marquette University Humanoid Engineering & Intelligent Robotics (HEIR) Lab is a robotics lab in Marquette University's College of Engineering.
The 2012 RoboCup 2D Soccer Simulation League was a simulated soccer competition contested in the 16th Annual RoboCup International Symposium, held in Mexico City, Mexico, in June 2012.
Cloud robotics is a field of robotics that attempts to invoke cloud technologies such as cloud computing, cloud storage, and other Internet technologies centered on the benefits of converged infrastructure and shared services for robotics. When connected to the cloud, robots can benefit from the powerful computation, storage, and communication resources of modern data center in the cloud, which can process and share information from various robots or agent. Humans can also delegate tasks to robots remotely through networks. Cloud computing technologies enable robot systems to be endowed with powerful capability whilst reducing costs through cloud technologies. Thus, it is possible to build lightweight, low cost, smarter robots with an intelligent "brain" in the cloud. The "brain" consists of data center, knowledge base, task planners, deep learning, information processing, environment models, communication support, etc.
Bin picking is a core problem in computer vision and robotics. The goal is to have a robot with sensors and cameras attached to it pick-up known objects with random poses out of a bin using a suction gripper, parallel gripper, or other kind of robot end effector. Amazon previously held a competition focused on bin picking referred to as the "Amazon Picking Challenge", which was held from 2015 to 2017. The challenge tasked entrants with building their own robot hardware and software that could attempt simplified versions of the general task of picking and stowing items on shelves. The robots were scored by how many items were picked and stowed in a fixed amount of time. The first Amazon Robotics challenge was won by a team from TU Berlin in 2015, followed by a team from TU Delft in 2016. The last Amazon Robotics Challenge was won by the Australian Centre for Robotic Vision at Queensland University of Technology with their robot named Cartman. The Amazon Robotics/Picking Challenge was discontinued following the 2017 competition.

NimbRo is the robot competition team of the Autonomous Intelligent Systems group of University of Bonn, Germany. It was founded in 2004 at the University of Freiburg, Germany.
Oskar von Stryk is professor of simulation, system optimization and robotics at the department of computer science of the Technische Universität Darmstadt. He is known for his research on robotics.


