
Radar is a system that uses radio waves to determine the distance (ranging), direction, and radial velocity of objects relative to the site. It is a radiodetermination method used to detect and track aircraft, ships, spacecraft, guided missiles, motor vehicles, map weather formations, and terrain.

A Doppler radar is a specialized radar that uses the Doppler effect to produce velocity data about objects at a distance. It does this by bouncing a microwave signal off a desired target and analyzing how the object's motion has altered the frequency of the returned signal. This variation gives direct and highly accurate measurements of the radial component of a target's velocity relative to the radar. The term applies to radar systems in many domains like aviation, police radar detectors, navigation, meteorology, etc.

A multistatic radar system contains multiple spatially diverse monostatic radar or bistatic radar components with a shared area of coverage. An important distinction of systems based on these individual radar geometries is the added requirement for some level of data fusion to take place between component parts. The spatial diversity afforded by multistatic systems allows different aspects of a target to be viewed simultaneously. The potential for information gain can give rise to a number of advantages over conventional systems.

The Mid-Canada Line (MCL), also known as the McGill Fence, was a line of radar stations running east–west across the middle of Canada, used to provide early warning of a Soviet bomber attack on North America. It was built to supplement the Pinetree Line, which was located farther south. The majority of Mid-Canada Line stations were used only briefly from the late 1950s to the mid-1960s, as the attack threat changed from bombers to ICBMs. As the MCL was closed down, the early warning role passed almost entirely to the newer and more capable DEW Line farther north.
Radar cross-section (RCS), denoted σ, also called radar signature, is a measure of how detectable an object is by radar. A larger RCS indicates that an object is more easily detected.

Imaging radar is an application of radar which is used to create two-dimensional images, typically of landscapes. Imaging radar provides its light to illuminate an area on the ground and take a picture at radio wavelengths. It uses an antenna and digital computer storage to record its images. In a radar image, one can see only the energy that was reflected back towards the radar antenna. The radar moves along a flight path and the area illuminated by the radar, or footprint, is moved along the surface in a swath, building the image as it does so.
In pulsed radar and sonar signal processing, an ambiguity function is a two-dimensional function of propagation delay and Doppler frequency , . It represents the distortion of a returned pulse due to the receiver matched filter of the return from a moving target. The ambiguity function is defined by the properties of the pulse and of the filter, and not any particular target scenario.

The Kolchuga passive sensor is an electronic-warfare support measures (ESM) system developed in the Soviet Union and manufactured in Ukraine. Its detection range is limited by line-of-sight but may be up to 800 km (500 mi) for very high altitude, very powerful emitters. Frequently referred to as Kolchuga Radar, the system is not really a radar, but an ESM system comprising three or four receivers, deployed tens of kilometres apart, which detect and track aircraft by triangulation and multilateration of their RF emissions.
A pulse-Doppler radar is a radar system that determines the range to a target using pulse-timing techniques, and uses the Doppler effect of the returned signal to determine the target object's velocity. It combines the features of pulse radars and continuous-wave radars, which were formerly separate due to the complexity of the electronics.

Continuous-wave radar is a type of radar system where a known stable frequency continuous wave radio energy is transmitted and then received from any reflecting objects. Individual objects can be detected using the Doppler effect, which causes the received signal to have a different frequency from the transmitted signal, allowing it to be detected by filtering out the transmitted frequency.
Passive radar is a class of radar systems that detect and track objects by processing reflections from non-cooperative sources of illumination in the environment, such as commercial broadcast and communications signals. It is a specific case of bistatic radar – passive bistatic radar (PBR) – which is a broad type also including the exploitation of cooperative and non-cooperative radar transmitters.
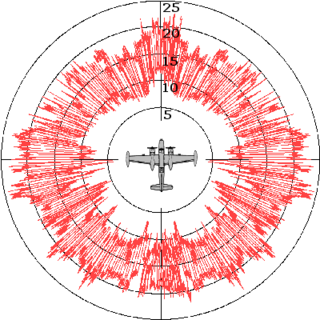
Inverse synthetic-aperture radar (ISAR) is a radar technique using radar imaging to generate a two-dimensional high resolution image of a target. It is analogous to conventional SAR, except that ISAR technology uses the movement of the target rather than the emitter to create the synthetic aperture. ISAR radars have a significant role aboard maritime patrol aircraft to provide them with radar image of sufficient quality to allow it to be used for target recognition purposes. In situations where other radars display only a single unidentifiable bright moving pixel, the ISAR image is often adequate to discriminate between various missiles, military aircraft, and civilian aircraft.

The Medicina Radio Observatory is an astronomical observatory located 30 km from Bologna, Italy. It is operated by the Institute for Radio Astronomy of the National Institute for Astrophysics (INAF) of the government of Italy.
Radar engineering is the design of technical aspects pertaining to the components of a radar and their ability to detect the return energy from moving scatterers — determining an object's position or obstruction in the environment. This includes field of view in terms of solid angle and maximum unambiguous range and velocity, as well as angular, range and velocity resolution. Radar sensors are classified by application, architecture, radar mode, platform, and propagation window.
Radar MASINT is a subdiscipline of measurement and signature intelligence (MASINT) and refers to intelligence gathering activities that bring together disparate elements that do not fit within the definitions of signals intelligence (SIGINT), imagery intelligence (IMINT), or human intelligence (HUMINT).
Bistatic sonar is a sonar configuration in which transmitter and receiver are separated by a distance large enough to be comparable to the distance to the target. Most sonar systems are monostatic, in that the transmitter and receiver are located in the same place. A configuration with multiple receivers is called multistatic.

The Motorola AN/FPS-23 was a short-range early warning radar deployed on the Distant Early Warning Line. It was used as a "gap filler", looking for aircraft attempting to sneak by the DEW line by flying between the main AN/FPS-19 stations at low altitude. It could detect aircraft flying at 200 feet over land or 50 feet over water. The system was known as Fluttar during its development at the Lincoln Laboratory, and this name was widely used for the production units as well. It was also sometimes known as "Type F". The system went into operation in 1957.
Beam park is a radar mode used for space surveillance, particularly tracking space debris. In beam-park mode, a radar beam is kept in a fixed direction with respect to the Earth, while objects passing through the beam are tracked. In 24 hours, as a result of the Earth’s rotation, the radar effectively scans a narrow strip through 360° of the celestial sphere. The scattered waves are detected by a receiver and the measurements obtained during the observations can be used to determine object radar cross-section, time of peak occurrence, polarization ratio, doppler shift and object rotation. The obtained information for each object is then processed and matched against data from previously catalogued objects. The beam-park mode can be used to detect both previously known and uncatalogued objects at any altitude, provided that the reflected power captured by the receiver can be distinguished from the noise. This limits the use of radar-based beam park observations to objects in Low-Earth Orbit (LEO). Optical instruments, in turn, have very good performance for objects in Geostationary Earth Orbit (GEO) and in Geostationary Transfer Orbit (GTO). The radar technique typically outperforms optical facilities in LEO and can conduct observations for longer periods, both during day and night, independently of the weather and object illumination by sunlight.
Sugar Tree is the name of a bistatic over-the-horizon radar built by the US in the 1960s. The key idea in Sugar Tree was a reinvention of the Klein Heidelberg Nazi German passive radar system developed for use in the Second World War. Sugar Tree was a "covert hitchhiker using Soviet, surface-wave HF radio broadcast signals and a remote sky-wave receiver to detect Soviet ballistic missile launches". The key idea, in other words, is to receive radar reflections without oneself transmitting a radar signal by using instead some other signal, typically one that originates from the adversary.
Klein Heidelberg (KH) was a passive radar system deployed by the Germans during World War II. It used the signals broadcast by the British Chain Home system as its transmitter, and a series of six stations along the western coast of continental Europe as passive receivers. In modern terminology, the system was a bistatic radar. Because the system sent no signals of its own, the allies were unaware of its presence, and did not learn of the system until well after the D-Day invasion. The system is referred to as Klein Heidelberg Parasit in some references.





