Related Research Articles

Boids is an artificial life program, developed by Craig Reynolds in 1986, which simulates the flocking behaviour of birds. His paper on this topic was published in 1987 in the proceedings of the ACM SIGGRAPH conference. The name "boid" corresponds to a shortened version of "bird-oid object", which refers to a bird-like object.

Simultaneous localization and mapping (SLAM) is the computational problem of constructing or updating a map of an unknown environment while simultaneously keeping track of an agent's location within it. While this initially appears to be a chicken or the egg problem, there are several algorithms known to solve it in, at least approximately, tractable time for certain environments. Popular approximate solution methods include the particle filter, extended Kalman filter, covariance intersection, and GraphSLAM. SLAM algorithms are based on concepts in computational geometry and computer vision, and are used in robot navigation, robotic mapping and odometry for virtual reality or augmented reality.

Swarm robotics is an approach to the coordination of multiple robots as a system which consist of large numbers of mostly simple physical robots. ″In a robot swarm, the collective behavior of the robots results from local interactions between the robots and between the robots and the environment in which they act.″ It is supposed that a desired collective behavior emerges from the interactions between the robots and interactions of robots with the environment. This approach emerged on the field of artificial swarm intelligence, as well as the biological studies of insects, ants and other fields in nature, where swarm behaviour occurs.

A rapidly exploring random tree (RRT) is an algorithm designed to efficiently search nonconvex, high-dimensional spaces by randomly building a space-filling tree. The tree is constructed incrementally from samples drawn randomly from the search space and is inherently biased to grow towards large unsearched areas of the problem. RRTs were developed by Steven M. LaValle and James J. Kuffner Jr. They easily handle problems with obstacles and differential constraints and have been widely used in autonomous robotic motion planning.

Magnus B. Egerstedt is a Swedish-American roboticist who is the Dean of the Henry Samueli School of Engineering at the University of California, Irvine. He was formerly the Steve C. Chaddick School Chair and Professor at the School of Electrical and Computer Engineering, Georgia Institute of Technology.
Vijay Kumar is an Indian roboticist and UPS foundation professor in the School of Engineering & Applied Science with secondary appointments in computer and information science and electrical and systems engineering at the University of Pennsylvania, and became the new Dean of Penn Engineering on 1 July 2015.
In robotics, Vector Field Histogram (VFH) is a real time motion planning algorithm proposed by Johann Borenstein and Yoram Koren in 1991. The VFH utilizes a statistical representation of the robot's environment through the so-called histogram grid, and therefore places great emphasis on dealing with uncertainty from sensor and modeling errors. Unlike other obstacle avoidance algorithms, VFH takes into account the dynamics and shape of the robot, and returns steering commands specific to the platform. While considered a local path planner, i.e., not designed for global path optimality, the VFH has been shown to produce near optimal paths.

In robotics and computer vision, visual odometry is the process of determining the position and orientation of a robot by analyzing the associated camera images. It has been used in a wide variety of robotic applications, such as on the Mars Exploration Rovers.
The Mobile Robot Programming Toolkit (MRPT) is a cross-platform and open source C++ library aimed to help robotics researchers to design and implement algorithms related to Simultaneous Localization and Mapping (SLAM), computer vision and motion planning. Different research groups have employed MRPT to implement projects reported in some of the major robotics journals and conferences.
Allen was a robot introduced by Rodney Brooks and his team in the late 1980s, and was their first robot based on subsumption architecture. It had sonar distance and odometry on board, and used an offboard lisp machine to simulate subsumption architecture. It resembled a footstool on wheels.
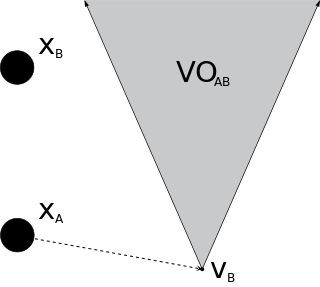
In robotics and motion planning, a velocity obstacle, commonly abbreviated VO, is the set of all velocities of a robot that will result in a collision with another robot at some moment in time, assuming that the other robot maintains its current velocity. If the robot chooses a velocity inside the velocity obstacle then the two robots will eventually collide, if it chooses a velocity outside the velocity obstacle, such a collision is guaranteed not to occur.

Any-angle path planning algorithms are pathfinding algorithms that search for a Euclidean shortest path between two points on a grid map while allowing the turns in the path to have any angle. The result is a path that cuts directly through open areas and has relatively few turns. More traditional pathfinding algorithms such as A* either lack in performance or produce jagged, indirect paths.
Ant robotics is a special case of swarm robotics. Swarm robots are simple robots with limited sensing and computational capabilities. This makes it feasible to deploy teams of swarm robots and take advantage of the resulting fault tolerance and parallelism. Swarm robots cannot use conventional planning methods due to their limited sensing and computational capabilities. Thus, their behavior is often driven by local interactions. Ant robots are swarm robots that can communicate via markings, similar to ants that lay and follow pheromone trails. Some ant robots use long-lasting trails. Others use short-lasting trails including heat and alcohol. Others even use virtual trails.

Oussama Khatib is a roboticist and a professor of computer science at Stanford University, and a Fellow of the IEEE. He is credited with seminal work in areas ranging from robot motion planning and control, human-friendly robot design, to haptic interaction and human motion synthesis. His work's emphasis has been to develop theories, algorithms, and technologies, that control robot systems by using models of their physical dynamics. These dynamic models are used to derive optimal controllers for complex robots that interact with the environment in real-time.

René Vidal is a Chilean electrical engineer and computer scientist who is known for his research in machine learning, computer vision, medical image computing, robotics, and control theory. He is the Herschel L. Seder Professor of the Johns Hopkins Department of Biomedical Engineering, and the founding director of the Mathematical Institute for Data Science (MINDS).

Yoram Koren is an Israeli-American academic. He is the James J. Duderstadt Distinguished University Professor Emeritus of Manufacturing and the Paul G. Goebel Professor Emeritus of Engineering at the University of Michigan, Ann Arbor. Since 2014 he is a distinguished visiting professor at the Technion – Israel Institute of Technology.

Shraga Shoval is an Israeli professor in the Department of Industrial Engineering & Management and the Dean of the Engineering Faculty at Ariel University

Zygmunt J. Haas is a professor and distinguished chair in computer science, University of Texas at Dallas (UTD) also the professor emeritus in electrical and computer engineering, Cornell University. His research interests include ad hoc networks, wireless networks, sensor networks, and zone routing protocols.
A continuum robot is a type of robot that is characterised by infinite degrees of freedom and number of joints. These characteristics allow continuum manipulators to adjust and modify their shape at any point along their length, granting them the possibility to work in confined spaces and complex environments where standard rigid-link robots cannot operate. In particular, we can define a continuum robot as an actuatable structure whose constitutive material forms curves with continuous tangent vectors. This is a fundamental definition that allows to distinguish between continuum robots and snake-arm robots or hyper-redundant manipulators: the presence of rigid links and joints allows them to only approximately perform curves with continuous tangent vectors.
References
- ↑ Borenstein, J.; Koren, Y. (1991). "The vector field histogram-fast obstacle avoidance for mobilerobots". IEEE Transactions on Robotics and Automation. 7 (3): 278–288. CiteSeerX 10.1.1.22.2796 . doi:10.1109/70.88137. S2CID 757244.
- ↑ Ulrich, I.; Borenstein, J. (1998). "VFH+: reliable obstacle avoidance for fast mobile robots". Robotics and Automation, 1998. Proceedings. 1998 IEEE International Conference on. Vol. 2. doi:10.1109/ROBOT.1998.677362.
- ↑ Borenstein, J.; Koren, Y. (1989). "Real-time obstacle avoidance for fact mobile robots". IEEE Transactions on Systems, Man, and Cybernetics. 19 (5): 1179–1187. doi:10.1109/21.44033.
- ↑ Koren, Y.; Borenstein, J. (1991). "Potential field methods and their inherent limitations for mobilerobot navigation". Robotics and Automation, 1991. Proceedings., 1991 IEEE International Conference on. pp. 1398–1404. doi:10.1109/ROBOT.1991.131810.