
A tricycle, sometimes abbreviated to trike, is a human-powered three-wheeled vehicle.

A torsion bar suspension, also known as a torsion spring suspension, is any vehicle suspension that uses a torsion bar as its main weight-bearing spring. One end of a long metal bar is attached firmly to the vehicle chassis; the opposite end terminates in a lever, the torsion key, mounted perpendicular to the bar, that is attached to a suspension arm, a spindle, or the axle. Vertical motion of the wheel causes the bar to twist around its axis and is resisted by the bar's torsion resistance. The effective spring rate of the bar is determined by its length, cross section, shape, material, and manufacturing process.

Suspension is the system of tires, tire air, springs, shock absorbers and linkages that connects a vehicle to its wheels and allows relative motion between the two. Suspension systems must support both road holding/handling and ride quality, which are at odds with each other. The tuning of suspensions involves finding the right compromise. The suspension is crucial for maintaining consistent contact between the road wheel and the road surface, as all forces exerted on the vehicle by the road or ground are transmitted through the tires' contact patches. The suspension also protects the vehicle itself and any cargo or luggage from damage and wear. The design of front and rear suspension of a car may be different.

A four-wheel drive, also called 4×4 or 4WD, is a two-axled vehicle drivetrain capable of providing torque to all of its wheels simultaneously. It may be full-time or on-demand, and is typically linked via a transfer case providing an additional output drive shaft and, in many instances, additional gear ranges.

Front-wheel drive (FWD) is a form of engine and transmission layout used in motor vehicles, in which the engine drives the front wheels only. Most modern front-wheel-drive vehicles feature a transverse engine, rather than the conventional longitudinal engine arrangement generally found in rear-wheel-drive and four-wheel-drive vehicles.

Quattro is the trademark used by the automotive brand Audi to indicate that all-wheel drive (AWD) technologies or systems are used on specific models of its automobiles.

A caster is an undriven wheel that is designed to be attached to the bottom of a larger object to enable that object to be moved.

A locking differential is a mechanical component, commonly used in vehicles, designed to overcome the chief limitation of a standard open differential by essentially "locking" both wheels on an axle together as if on a common shaft. This forces both wheels to turn in unison, regardless of the traction available to either wheel individually.

A drive shaft, driveshaft, driving shaft, tailshaft, propeller shaft, or Cardan shaft is a component for transmitting mechanical power, torque, and rotation, usually used to connect other components of a drivetrain that cannot be connected directly because of distance or the need to allow for relative movement between them.

A tow truck is a truck used to move disabled, improperly parked, impounded, or otherwise indisposed motor vehicles. This may involve recovering a vehicle damaged in an accident, returning one to a drivable surface in a mishap or inclement weather, or towing or transporting one via flatbed to a repair shop or other location.

A coupling rod or side rod connects the driving wheels of a locomotive. Steam locomotives in particular usually have them, but some diesel and electric locomotives, especially older ones and shunter locomotives, also have them. The coupling rods transfer the power of drive to all wheels.

A beam axle, rigid axle, or solid axle is a dependent suspension design in which a set of wheels is connected laterally by a single beam or shaft. Beam axles were once commonly used at the rear wheels of a vehicle, but historically, they have also been used as front axles in four-wheel-drive vehicles. In most automobiles, beam axles have been replaced with front (IFS) and rear independent suspensions (IRS).

A jackshaft is an intermediate shaft used to transfer power from a powered shaft such as the output shaft of an engine or motor to driven shafts such as the drive axles of a locomotive. As applied to railroad locomotives in the 19th and 20th centuries, jackshafts were typically in line with the drive axles of locomotives and connected to them by side rods. In general, each drive axle on a locomotive is free to move about one inch (2.5 cm) vertically relative to the frame, with the locomotive weight carried on springs. This means that if the engine, motor or transmission is rigidly attached to the locomotive frame, it cannot be rigidly connected to the axle. This problem can be solved by mounting the jackshaft on unsprung bearings and using side-rods or chain drives.

A Mecanum wheel is an omnidirectional wheel design for a land-based vehicle to move in any direction. It is sometimes called the Swedish wheel or Ilon wheel after its inventor, Bengt Erland Ilon (1923–2008), who conceived of the concept while working as an engineer with the Swedish company Mecanum AB, and patented it in the United States on November 13, 1972.
Omnidirectional refers to the notion of existing in every direction. Omnidirectional devices include:
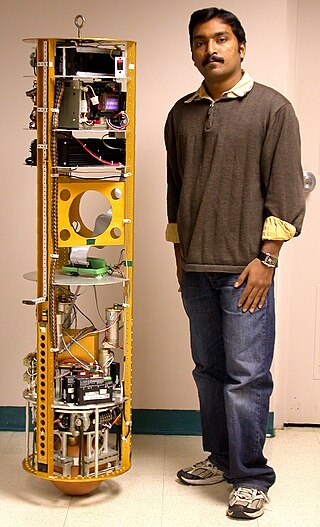
A ball balancing robot also known as a ballbot is a dynamically-stable mobile robot designed to balance on a single spherical wheel. Through its single contact point with the ground, a ballbot is omnidirectional and thus exceptionally agile, maneuverable and organic in motion compared to other ground vehicles. Its dynamic stability enables improved navigability in narrow, crowded and dynamic environments. The ballbot works on the same principle as that of an inverted pendulum.

The Spaceships of Ezekiel (1974) is a book by German engineer Josef F. Blumrich about a spaceship that was supposedly observed by the prophet Ezekiel as described in Book of Ezekiel in the Tanakh. Blumrich wrote it while chief of NASA's systems layout branch of the program development office at the Marshall Space Flight Center. It was originally published in German by Econ Verlag GmbH under the title Da tat sich der Himmel auf. Because it refers to theories and speculations about ancient astronauts, it is considered to be a work of pseudoscience as well as being an example of euhemerism.
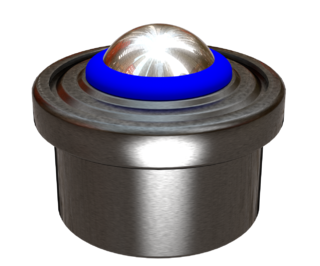
A ball transfer unit is an omnidirectional load-bearing sphere mounted inside a restraining fixture. They are identical in principle to a computer trackball. Typically the design involves a single large ball supported by smaller ball bearings.

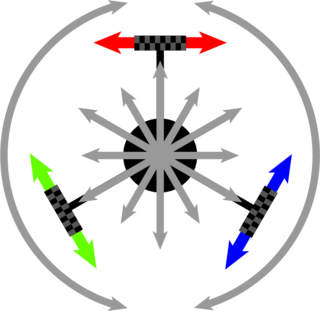
A Kiwi drive is a holonomic drive system of three omni-directional wheels, 120 degrees from each other, that enables movement in any direction using only three motors. This is in contrast with non-holonomic systems such as traditionally wheeled or tracked vehicles which cannot move sideways without turning first.
A Killough platform is a three-wheel drive system that uses traditional wheels to achieve omni-directional movement without the use of omni-directional wheels. Designed by Stephen Killough, after which the platform is named, with help from Francois Pin, wanted to achieve omni-directional movement without using the complicated six motor arrangement required to achieve a controllable three caster wheel system. He first looked into solutions by other inventors that used rollers on the rims larger wheels but considered them flawed in some critical way. This led to the Killough system:
Picture a round platform with three motors underneath, each governing the motion of two wheels that look like miniature balloon tires. The wheels in each pair are mounted in a cage at right angles to each other; the motor can rotate the cage so that one wheel or the other is touching the ground at any one time. By configuring the three pairs of wheels to allow the same type of motion found in three pivoting casters, and by changing the relative speeds of the motors, Killough can make his robotic platform rotate, follow a straight or curved path, and even rotate while moving forward.





