
An aerobot is an aerial robot, usually used in the context of an unmanned space probe or unmanned aerial vehicle.
The Venera program was the name given to a series of space probes developed by the Soviet Union between 1961 and 1984 to gather information about the planet Venus. Ten probes successfully landed on the surface of the planet, including the two Vega program and Venera-Halley probes, while thirteen probes successfully entered the Venusian atmosphere. Due to the extreme surface conditions on Venus, the probes could only survive for a short period on the surface, with times ranging from 23 minutes to two hours.

Geoffrey Alan Landis is an American aerospace engineer and author, working for the National Aeronautics and Space Administration (NASA) on planetary exploration, interstellar propulsion, solar power and photovoltaics. He holds nine patents, primarily in the field of improvements to solar cells and photovoltaic devices and has given presentations and commentary on the possibilities for interstellar travel and construction of bases on the Moon, Mars, and Venus.

Venera 1, also known as Venera-1VA No.2 and occasionally in the West as Sputnik 8 was the first spacecraft to fly past Venus, as part of the Soviet Union's Venera programme. Launched in February 1961, it flew past Venus on 19 May of the same year; however, radio contact with the probe was lost before the flyby, resulting in it returning no data.

The Mars 2 was an uncrewed space probe of the Mars program, a series of uncrewed Mars landers and orbiters launched by the Soviet Union beginning 19 May 1971. The Mars 2 and Mars 3 missions consisted of identical spacecraft, each with an orbiter and an attached lander. The orbiter is identical to the Venera 9 bus. The type of bus/orbiter is the 4MV. They were launched by a Proton-K heavy launch vehicle with a Blok D upper stage. The lander of Mars 2 became the first human-made object to reach the surface of Mars, although the landing system failed and the lander was lost.
Mars 3 was a robotic space probe of the Soviet Mars program, launched May 28, 1971, nine days after its twin spacecraft Mars 2. The probes were identical robotic spacecraft launched by Proton-K rockets with a Blok D upper stage, each consisting of an orbiter and an attached lander. After the Mars 2 lander crashed on the Martian surface, the Mars 3 lander became the first spacecraft to attain a soft landing on Mars, on December 2, 1971. It failed 110 seconds after landing, having transmitted only a gray image with no details. The Mars 2 orbiter and Mars 3 orbiter continued to circle Mars and transmit images back to Earth for another eight months.
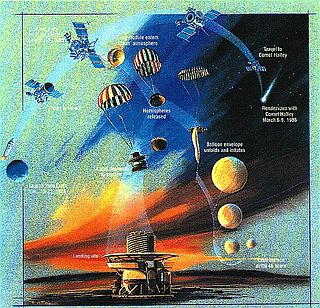
The Vega program was a series of Venus missions that also took advantage of the appearance of comet 1P/Halley in 1986. Vega 1 and Vega 2 were uncrewed spacecraft launched in a cooperative effort among the Soviet Union and Austria, Bulgaria, France, Hungary, the German Democratic Republic, Poland, Czechoslovakia, and the Federal Republic of Germany in December 1984. They had a two-part mission to investigate Venus and also flyby Halley's Comet.

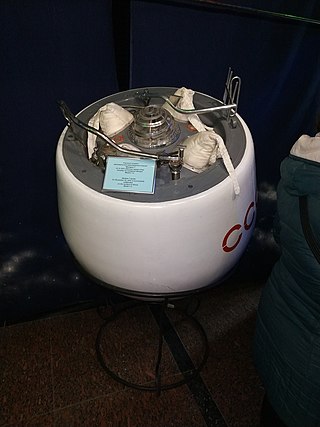
Vega 2 was a Soviet space probe part of the Vega program to explore Halley's comet and Venus. The spacecraft was a development of the earlier Venera craft. The name VeGa (ВеГа) combines the first two letters Russian words for Venus and Halley They were designed by Babakin Space Centre and constructed as 5VK by Lavochkin at Khimki. The craft was powered by large twin solar panels. Instruments included an antenna dish, cameras, spectrometer, infrared sounder, magnetometers (MISCHA) and plasma probes. The 4,840 kilograms (10,670 lb) craft was launched on top of a Proton 8K82K rocket from Baikonur Cosmodrome, Tyuratam, Kazakh SSR. Both Vega 1 and 2 were three-axis stabilized spacecraft. The spacecraft were equipped with a dual bumper shield for dust protection from Halley's Comet.

The Discovery Program is a series of Solar System exploration missions funded by the US National Aeronautics and Space Administration (NASA) through its Planetary Missions Program Office. The cost of each mission is capped at a lower level than missions from NASA's New Frontiers or Flagship Programs. As a result, Discovery missions tend to be more focused on a specific scientific goal rather than serving a general purpose.
Venera 7 was a Soviet spacecraft, part of the Venera series of probes to Venus. When it landed on the Venusian surface on 15 December 1970, it became the first spacecraft to soft land on another planet and the first to transmit data from there back to Earth.

Venera 13 was part of the Soviet Venera program meant to explore Venus.
Venera 14 was a probe in the Soviet Venera program for the exploration of Venus.

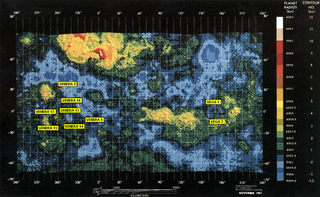
Observations of the planet Venus include those in antiquity, telescopic observations, and from visiting spacecraft. Spacecraft have performed various flybys, orbits, and landings on Venus, including balloon probes that floated in the atmosphere of Venus. Study of the planet is aided by its relatively close proximity to the Earth, compared to other planets, but the surface of Venus is obscured by an atmosphere opaque to visible light.

The colonization of Venus has been a subject of many works of science fiction since before the dawn of spaceflight, and is still discussed from both a fictional and a scientific standpoint. However, with the discovery of Venus's extremely hostile surface environment, attention has largely shifted towards the colonization of the Moon and Mars instead, with proposals for Venus focused on habitats floating in the upper-middle atmosphere and on terraforming.

The atmosphere of Venus is the layer of gases surrounding Venus. It is composed primarily of supercritical carbon dioxide and is much denser and hotter than that of Earth. The temperature at the surface is 740 K, and the pressure is 93 bar (1,350 psi), roughly the pressure found 900 m (3,000 ft) underwater on Earth. The Venusian atmosphere supports opaque clouds of sulfuric acid, making optical Earth-based and orbital observation of the surface impossible. Information about the topography has been obtained exclusively by radar imaging. Aside from carbon dioxide, the other main component is nitrogen. Other chemical compounds are present only in trace amounts.

Venera-D is a proposed Russian space mission to Venus that would include an orbiter and a lander to be launched in 2029. The orbiter's prime objective is to perform observations with the use of a radar. The lander, based on the Venera design, would be capable of operating for a long duration on the planet's surface. The "D" in Venera-D stands for "dolgozhivushaya," which means "long lasting" in Russian.
High Altitude Venus Operational Concept (HAVOC) is a set of crewed NASA mission concepts to the planet Venus. All human portions of the missions would be conducted from lighter-than-air craft or from orbit.
Kosmos 359 was an unmanned Soviet probe launched on 22 August 1970. The probe's intended purpose was to explore Venus, but an error caused the final-stage rocket to malfunction. This left the craft trapped in an elliptical orbit around Earth for 410 days before orbital decay and atmospheric entry. Kosmos 359 was launched five days after Venera 7 and had an identical design; had the craft not suffered a mission-ending failure, it would have landed on Venus shortly after Venera 7. To publicly acknowledge the failure of the attempted Venus lander would be a public relations disaster for the Soviet space program; after the mission failed, the Venera spacecraft was renamed Kosmos 359 in order to conceal the mishap from the public.

Automaton Rover for Extreme Environments (AREE) is a NASA Innovative Advanced Concepts project to design a rover that can operate in the environment of Venus, controlled by a wind-powered mechanical computer. Venus' atmosphere is about 90 times denser than Earth's and the surface temperature of at least 462 °C (864 °F), conditions which would prevent a standard electronic computer from operating for any significant period of time. While AREE is being designed for operation on Venus, the rover's design could be re-purposed for use on Mercury, which has a comparably high surface temperature, on Jovian moons Europa or Io, where high radiation makes use of traditional electronics difficult, or on lava flows or highly radioactive areas on Earth.
Venus Atmospheric Maneuverable Platform (VAMP) is a mission concept by the aerospace companies Northrop Grumman and LGarde for a powered, long endurance, semi-buoyant inflatable aircraft that would explore the upper atmosphere of planet Venus for biosignatures as well as perform atmospheric measurements. The inflatable aircraft has a trapezoidal shape that is sometimes called delta wing or flying wing, and would have dual electric-driven propellers that would be stowed during atmospheric entry.





