
A humanoid robot is a robot resembling the human body in shape. The design may be for functional purposes, such as interacting with human tools and environments, for experimental purposes, such as the study of bipedal locomotion, or for other purposes. In general, humanoid robots have a torso, a head, two arms, and two legs, though some humanoid robots may replicate only part of the body, for example, from the waist up. Some humanoid robots also have heads designed to replicate human facial features such as eyes and mouths. Androids are humanoid robots built to aesthetically resemble humans.
Robotic control is the system that contributes to the movement of robots. This involves the mechanical aspects and programmable systems that makes it possible to control robots. Robotics can be controlled by various means including manual, wireless, semi-autonomous, and fully autonomous.

The Mobile Servicing System (MSS), is a robotic system on board the International Space Station (ISS). Launched to the ISS in 2001, it plays a key role in station assembly and maintenance; it moves equipment and supplies around the station, supports astronauts working in space, and services instruments and other payloads attached to the ISS and is used for external maintenance. Astronauts receive specialized training to enable them to perform these functions with the various systems of the MSS.

The German Aerospace Center is the national center for aerospace, energy and transportation research of Germany, founded in 1969. It is headquartered in Cologne with 35 locations throughout Germany. The DLR is engaged in a wide range of research and development projects in national and international partnerships.

Dextre, also known as the Special Purpose Dexterous Manipulator (SPDM), is a two-armed robot, or telemanipulator, which is part of the Mobile Servicing System on the International Space Station (ISS), and does repairs that would otherwise require astronauts to do spacewalks. It was launched on March 11, 2008, on the mission STS-123.
Domo is an experimental robot made by the Massachusetts Institute of Technology designed to interact with humans. The brainchild of Jeff Weber and Aaron Edsinger, cofounders of Meka Robotics, its name comes from the Japanese phrase for "thank you very much", domo arigato, as well as the Styx song, "Mr. Roboto". The Domo project was originally funded by NASA, and has now been joined by Toyota in funding robot's development.

A robonaut is a humanoid robot, part of a development project conducted by the Dexterous Robotics Laboratory at NASA's Lyndon B. Johnson Space Center (JSC) in Houston, Texas. Robonaut differs from other current space-faring robots in that, while most current space robotic systems are designed to move large objects, Robonaut's tasks require more dexterity.

Six degrees of freedom (6DOF), or sometimes six degrees of movement, refers to the six mechanical degrees of freedom of movement of a rigid body in three-dimensional space. Specifically, the body is free to change position as forward/backward (surge), up/down (heave), left/right (sway) translation in three perpendicular axes, combined with changes in orientation through rotation about three perpendicular axes, often termed yaw, pitch, and roll.

iCub is a one meter tall open source robotics humanoid robot testbed for research into human cognition and artificial intelligence.
Coco is the latest platform at the Massachusetts Institute of Technology's Humanoid Robotics Group, and a successor to Cog. Unlike previous platforms, Coco is built along more ape-like lines, rather than human. Coco is also notable for being mobile. Although there is ongoing research on the robot, the group has many robots dealing with human interactions. The Humanoid Robotics Group has planned to add more useful functions in the future, but have not set an exact date for such project.
The Battlefield Extraction-Assist Robot (BEAR) is a remotely controlled robot developed by Vecna Robotics for use in the extraction of wounded soldiers from the battlefield with no risk to human life. The humanoid robot uses a powerful hydraulics system to carry humans and other heavy objects over long distances and rough terrain, such as stairs.
Boston Dynamics, Inc., is an American engineering and robotics design company founded in 1992 as a spin-off from the Massachusetts Institute of Technology. Headquartered in Waltham, Massachusetts, Boston Dynamics has been owned by the Hyundai Motor Group since December 2020, but having only completed the acquisition in June 2021.

REEM is the latest prototype humanoid robot built by PAL Robotics in Spain. It is a 1.70 m high humanoid robot with 22 degrees of freedom, with a mobile base with wheels, allowing it to move at 4 km/hour. The upper part of the robot consists of a torso with a touch screen, two motorized arms, which give it a high degree of expression, and a head, which is also motorized.
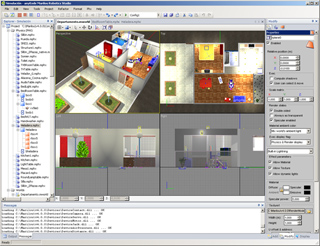
anyKode Marilou is a modeling and simulation environment for mobile robots, humanoids, articulated arms and parallel robots operating in real-world conditions that respect the laws of physics. This robotics suite is used in research centers and industry for various projects like humanoid architectures, wheeled and multi legged vehicles, and multi-robot systems (Multi-agents).

Robotics is the branch of technology that deals with the design, construction, operation, structural disposition, manufacture and application of robots. Robotics is related to the sciences of electronics, engineering, mechanics, and software.

Open-source robotics is a branch of robotics where robots are developed with open-source hardware and free and open-source software, publicly sharing blueprints, schematics, and source code. It is thus closely related to the open design movement, the maker movement and open science.

SEROPI is a wheel based humanoid robot developed by KITECH.
Spacecraft attitude control is the process of controlling the orientation of a spacecraft with respect to an inertial frame of reference or another entity such as the celestial sphere, certain fields, and nearby objects, etc.

Sanbot is an intelligent, cloud-enabled service robot developed by Qihan Technology Co. Ltd., a robotics and AI company who has their headquarters in Shenzhen, China. Qihan has launched three generations of intelligent robots under the Sanbot brand – Sanbot Elf Sanbot King Kong and Sanbot Nano.

