
Adobe Photoshop is a raster graphics editor developed and published by Adobe for Windows and macOS. It was originally created in 1987 by Thomas and John Knoll. Since then, the software has become the most used tool for professional digital art, especially in raster graphics editing. Owing to its fame, the program's name has become genericised as a verb although Adobe disapproves of such use.
AIBO is a series of robotic dogs designed and manufactured by Sony. Sony announced a prototype Aibo in mid-1998, and the first consumer model was introduced on 11 May 1999. New models were released every year until 2006. Although most models were dogs, other inspirations included lion cubs, huskies, Jack Russell terriers, bull terrier, and space explorers. Only the ERS-7, ERS-110/111 and ERS-1000 versions were explicitly a "robotic dog", but the 210 can also be considered a dog due to its Jack Russell Terrier appearance and face. In 2006, AIBO was added into the Carnegie Mellon University Robot Hall of Fame.
PeopleSoft, Inc. is a company that provides human resource management systems (HRMS), financial management solutions (FMS), supply chain management (SCM), customer relationship management (CRM), and enterprise performance management (EPM) software, as well as software for manufacturing, and student administration to large corporations, governments, and organizations. It existed as an independent corporation until its acquisition by Oracle Corporation in 2005. The PeopleSoft name and product line are now marketed by Oracle.

RoboCup is an annual international robotics competition founded in 1996 by a group of university professors. The aim of the competition is to promote robotics and AI research by offering a publicly appealing – but formidable – challenge.

SoftBank Group Corp. is a Japanese multinational investment holding company headquartered in Minato, Tokyo which focuses on investment management. The group primarily invests in companies operating in technology that offer goods and services to customers in a multitude of markets and industries ranging from the internet to automation. With over $100 billion in capital at its onset, SoftBank's Vision Fund is the world's largest technology-focused venture capital fund. Fund investors included sovereign wealth funds from countries in the Middle East.

Adobe Captivate is an authoring tool that is used for creating eLearning content such as software demonstrations, software simulations, branched scenarios, and randomized quizzes in HTML5 format.
Tungsten Automation, formerly Kofax Inc., is an Irvine, California-based intelligent automation software provider. Founded in 1985, the company's software allows businesses to automate and improve business workflows by simplifying the handling of data and documents.

Finastra is a financial software company headquartered in London, England. The company offers a portfolio of products and solutions to the retail banking, transaction banking, lending, and treasury capital markets. Finastra was formed in 2017 by the combination of London-based Misys, a provider of financial operations software, and global payments and lending technology provider D+H. At the time of its formation, Finastra was considered the third-largest financial services company in the world.
Boston Dynamics is an American engineering and robotics design company founded in 1992 as a spin-off from the Massachusetts Institute of Technology. Headquartered in Waltham, Massachusetts, Boston Dynamics has been owned by the Hyundai Motor Group since December 2020, but having only completed the acquisition in June 2021.

The Robotis Bioloid is a hobbyist and educational robot kit produced by the South Korean robot manufacturer Robotis. The Bioloid platform consists of components and small, modular servomechanisms called the AX-12A Dynamixels, which can be used in a daisy-chained fashion to construct robots of various configurations, such as wheeled, legged, or humanoid robots. The Robot is programmed with RoboPlus, C based software. The Bioloid system is thus comparable to the Lego Mindstorms, and VEX Robotics VEXplorer kits.

Robot Operating System is an open-source robotics middleware suite. Although ROS is not an operating system (OS) but a set of software frameworks for robot software development, it provides services designed for a heterogeneous computer cluster such as hardware abstraction, low-level device control, implementation of commonly used functionality, message-passing between processes, and package management. Running sets of ROS-based processes are represented in a graph architecture where processing takes place in nodes that may receive, post, and multiplex sensor data, control, state, planning, actuator, and other messages. Despite the importance of reactivity and low latency in robot control, ROS is not a real-time operating system (RTOS). However, it is possible to integrate ROS with real-time computing code. The lack of support for real-time systems has been addressed in the creation of ROS 2, a major revision of the ROS API which will take advantage of modern libraries and technologies for core ROS functions and add support for real-time code and embedded system hardware.

Arm Holdings plc is a British semiconductor and software design company based in Cambridge, England, whose primary business is the design of central processing unit (CPU) cores that implement the ARM architecture family of instruction sets. It also designs other chips, provides software development tools under the DS-5, RealView and Keil brands, and provides systems and platforms, system-on-a-chip (SoC) infrastructure and software. As a "holding" company, it also holds shares of other companies. Since 2016, it has been majority owned by Japanese conglomerate SoftBank Group.
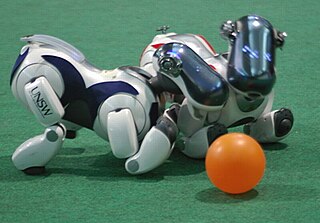
The RoboCup Standard Platform League (SPL) is one of several leagues within RoboCup, an international competition with autonomous robotic soccer matches as the main event.

The RoboCup 3D Simulated Soccer League allows software agents to control humanoid robots to compete against one another in a realistic simulation of the rules and physics of a game of soccer. The platform strives to reproduce the software programming challenges faced when building real physical robots for this purpose. In doing so, it helps research towards the RoboCup Federation's goal of developing a team of fully autonomous humanoid robots that can win against the human world soccer champion team in 2050.
Rayman 2: The Great Escape is a 1999 platform game developed by Ubi Pictures and published by Ubi Soft for the Nintendo 64, Windows, Dreamcast and PlayStation. The game centers on the titular character Rayman, who was tasked with saving his friend Globox and the fantastical land of the Fairy Glade from an army of robotic pirates led by Admiral Razorbeard.

Pepper is a semi-humanoid robot manufactured by SoftBank Robotics, designed with the ability to read emotions. It was introduced in Japan in June 2014.
Bradley James Nelson is an American roboticist and entrepreneur. He has been the Professor of Robotics and Intelligent Systems at ETH Zurich since 2002 and is known for his research in microrobotics, nanorobotics, and medical robotics.
RobotLAB is an American educational technology company that manufactures robotics and virtual reality products for K-12 and higher education, as well as business robots for retail, hospitality, and medical companies. The company distributes the Pepper and NAO humanoid robots developed by SoftBank Robotics. They are headquartered in Dallas, Texas.
Angelica Lim is an American-Canadian AI roboticist. She first started researching robots in 2008. Lim is currently an assistant professor in Computing Science at Simon Fraser University in Canada. She is also the head and founder of the Simon Fraser University Rosie Lab, which specializes in AI software development. Much of her work involves exploring the emotional capabilities of AI machines, and how AI interacts with music. Lim is the first to provide a scientifically published definition and implementation for robot feelings.


