The Challenger Deep is the deepest known point of the seabed of Earth, located in the western Pacific Ocean at the southern end of the Mariana Trench, in the ocean territory of the Federated States of Micronesia. According to the GEBCO Gazetteer of Undersea Feature Names the depression's depth is 10,920 ± 10 m (35,827 ± 33 ft) at 11°22.4′N142°35.5′E, although its exact geodetic location remains inconclusive and its depth has been measured at 10,902–10,929 m (35,768–35,856 ft) by deep-diving submersibles, remotely operated underwater vehicles, benthic landers, and sonar bathymetry. The differences in depth estimates and their geodetic positions are scientifically explainable by the difficulty of researching such deep locations.

Sonar is a technique that uses sound propagation to navigate, measure distances (ranging), communicate with or detect objects on or under the surface of the water, such as other vessels.
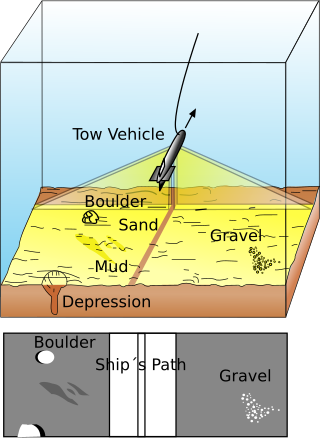
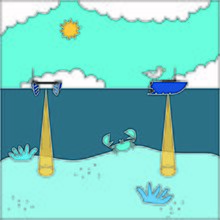
Side-scan sonar is a category of sonar system that is used to efficiently create an image of large areas of the sea floor.

Hydrography is the branch of applied sciences which deals with the measurement and description of the physical features of oceans, seas, coastal areas, lakes and rivers, as well as with the prediction of their change over time, for the primary purpose of safety of navigation and in support of all other marine activities, including economic development, security and defense, scientific research, and environmental protection.

Hydrographic survey is the science of measurement and description of features which affect maritime navigation, marine construction, dredging, offshore wind farms, offshore oil exploration and drilling and related activities. Surveys may also be conducted to determine the route of subsea cables such as telecommunications cables, cables associated with wind farms, and HVDC power cables. Strong emphasis is placed on soundings, shorelines, tides, currents, seabed and submerged obstructions that relate to the previously mentioned activities. The term hydrography is used synonymously to describe maritime cartography, which in the final stages of the hydrographic process uses the raw data collected through hydrographic survey into information usable by the end user.
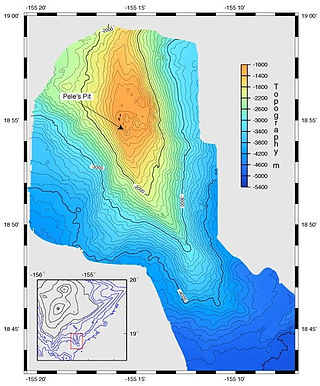
A bathymetric chart is a type of isarithmic map that depicts the submerged topography and physiographic features of ocean and sea bottoms. Their primary purpose is to provide detailed depth contours of ocean topography as well as provide the size, shape and distribution of underwater features. Topographic maps display elevation above ground and are complementary to bathymetric charts. Charts use a series of lines and points at equal intervals to showcase depth or elevation. A closed shape with increasingly smaller shapes inside of it can indicate an ocean trench or a seamount, or underwater mountain, depending on whether the depths increase or decrease going inward.
Bathymetry is the study of underwater depth of ocean floors, lake floors, or river floors. In other words, bathymetry is the underwater equivalent to hypsometry or topography. The first recorded evidence of water depth measurements are from Ancient Egypt over 3000 years ago. Bathymetric charts, are typically produced to support safety of surface or sub-surface navigation, and usually show seafloor relief or terrain as contour lines and selected depths (soundings), and typically also provide surface navigational information. Bathymetric maps may also use a Digital Terrain Model and artificial illumination techniques to illustrate the depths being portrayed. The global bathymetry is sometimes combined with topography data to yield a global relief model. Paleobathymetry is the study of past underwater depths.

A fishfinder or sounder (Australia) is an instrument used to locate fish underwater by detecting reflected pulses of sound energy, as in sonar. A modern fishfinder displays measurements of reflected sound on a graphical display, allowing an operator to interpret information to locate schools of fish, underwater debris, and the bottom of a body of water. Fishfinder instruments are used both by sport and commercial fishermen. Modern electronics allow a high degree of integration between the fishfinder system, marine radar, compass and GPS navigation systems.

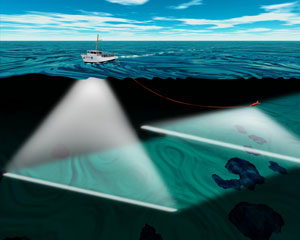
A multibeam echosounder (MBES) is a type of sonar that is used to map the seabed. It emits acoustic waves in a fan shape beneath its transceiver. The time it takes for the sound waves to reflect off the seabed and return to the receiver is used to calculate the water depth. Unlike other sonars and echo sounders, MBES uses beamforming to extract directional information from the returning soundwaves, producing a swathe of depth soundings from a single ping.

Underwater acoustics is the study of the propagation of sound in water and the interaction of the mechanical waves that constitute sound with the water, its contents and its boundaries. The water may be in the ocean, a lake, a river or a tank. Typical frequencies associated with underwater acoustics are between 10 Hz and 1 MHz. The propagation of sound in the ocean at frequencies lower than 10 Hz is usually not possible without penetrating deep into the seabed, whereas frequencies above 1 MHz are rarely used because they are absorbed very quickly.

Ultrasonic transducers and ultrasonic sensors are devices that generate or sense ultrasound energy. They can be divided into three broad categories: transmitters, receivers and transceivers. Transmitters convert electrical signals into ultrasound, receivers convert ultrasound into electrical signals, and transceivers can both transmit and receive ultrasound.
Acoustic seabed classification is the partitioning of a seabed acoustic image into discrete physical entities or classes. This is a particularly active area of development in the field of seabed mapping, marine geophysics, underwater acoustics and benthic habitat mapping. Seabed classification is one route to characterizing the seabed and its habitats. Seabed characterization makes the link between the classified regions and the seabed physical, geological, chemical or biological properties. Acoustic seabed classification is possible using a wide range of acoustic imaging systems including multibeam echosounders, sidescan sonar, single-beam echosounders, interferometric systems and sub-bottom profilers. Seabed classification based on acoustic properties can be divided into two main categories; surficial seabed classification and sub-surface seabed classification. Sub-surface imaging technologies use lower frequency sound to provide higher penetration, whereas surficial imaging technologies provide higher resolution imagery by utilizing higher frequencies.
Fisheries acoustics includes a range of research and practical application topics using acoustical devices as sensors in aquatic environments. Acoustical techniques can be applied to sensing aquatic animals, zooplankton, and physical and biological habitat characteristics.

Depth sounding, often simply called sounding, is measuring the depth of a body of water. Data taken from soundings are used in bathymetry to make maps of the floor of a body of water, such as the seabed topography.
A sound velocity probe is a device that is used for measuring the speed of sound, specifically in the water column, for oceanographic and hydrographic research purposes.
RESON A/S is a Danish company which provides tools for underwater acoustic applications and survey accuracy requirements.

Captain Nicholas Hunter Heck was a career officer of the United States Coast and Geodetic Survey Corps. A leading geophysicist of his time, Heck made important contributions in the study of seismology and oceanography. He also revolutionized hydrographic surveying by developing the wire-drag surveying technique and introduced radio acoustic ranging into Coast and Geodetic Survey hydrography.
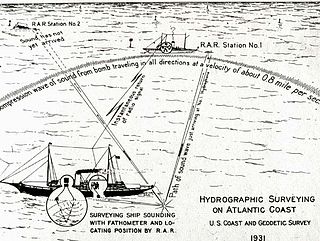
Radio acoustic ranging, occasionally written as "radio-acoustic ranging" and sometimes abbreviated RAR, was a method for determining a ship's precise location at sea by detonating an explosive charge underwater near the ship, detecting the arrival of the underwater sound waves at remote locations, and radioing the time of arrival of the sound waves at the remote stations to the ship, allowing the ship's crew to use true range multilateration to determine the ship's position. Developed by the United States Coast and Geodetic Survey in 1923 and 1924 for use in accurately fixing the position of survey ships during hydrographic survey operations, it was the first navigation technique in human history other than dead reckoning that did not require visual observation of a landmark, marker, light, or celestial body, and the first non-visual means to provide precise positions. First employed operationally in 1924, radio acoustic ranging remained in use until 1944, when new radio navigation techniques developed during World War II rendered it obsolete.
An underwater survey is a survey performed in an underwater environment or conducted remotely on an underwater object or region. Survey can have several meanings. The word originates in Medieval Latin with meanings of looking over and detailed study of a subject. One meaning is the accurate measurement of a geographical region, usually with the intention of plotting the positions of features as a scale map of the region. This meaning is often used in scientific contexts, and also in civil engineering and mineral extraction. Another meaning, often used in a civil, structural, or marine engineering context, is the inspection of a structure or vessel to compare actual condition with the specified nominal condition, usually with the purpose of reporting on the actual condition and compliance with, or deviations from, the nominal condition, for quality control, damage assessment, valuation, insurance, maintenance, and similar purposes. In other contexts it can mean inspection of a region to establish presence and distribution of specified content, such as living organisms, either to establish a baseline, or to compare with a baseline.

Underwater exploration is the exploration of any underwater environment, either by direct observation by the explorer, or by remote observation and measurement under the direction of the investigators. Systematic, targeted exploration is the most effective method to increase understanding of the ocean and other underwater regions, so they can be effectively managed, conserved, regulated, and their resources discovered, accessed, and used. Less than 10% of the ocean has been mapped in any detail, less has been visually observed, and the total diversity of life and distribution of populations is similarly obscure.